


РОБОТИЗИРОВАННЫЕ КОМПЛЕКСЫ И СИСТЕМЫ. ТЕХНОЛОГИИ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ
- Проведен анализ особенностей автоматической стыковки, как одной из задач группового управления автономными роботами в составе многоагентных систем, способных реконфигурировать свою структуру для целенаправленного изменения имеющегося набора функциональных свойств и возможностей прикладного применения.
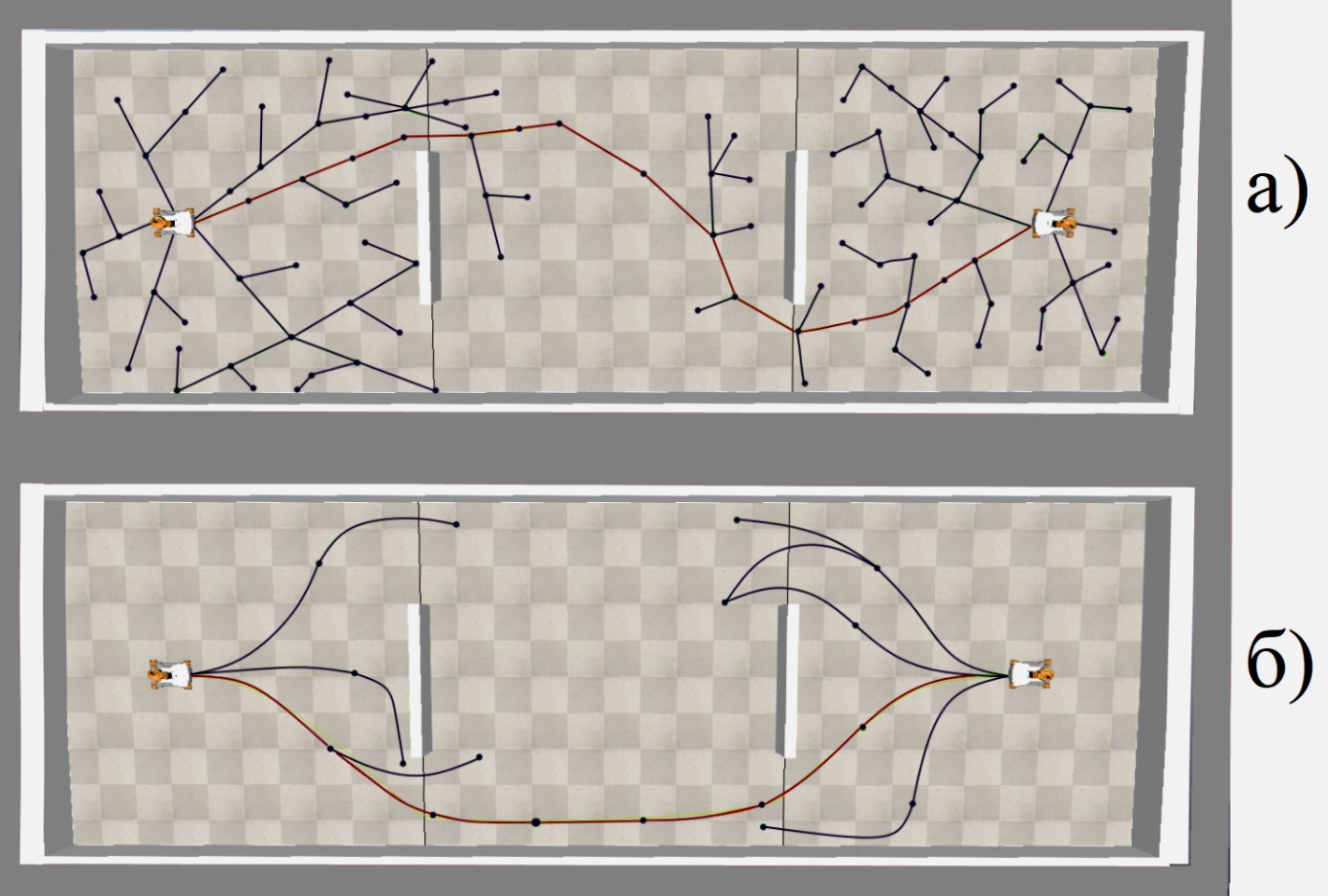
- Предложена децентрализованная модификация метода поисковых случайных деревьев со встречным ростом, позволяющая обеспечить планирование перемещений автономных мобильных роботов по ходу их взаимного сближения и последующей стыковки.
- Разработан комплекс программно-алгоритмических средств автоматизации стыковки автономных роботов.
- Проведены серии модельных и натурных экспериментов, подтвердивших эффективность развиваемого подхода.
Цели. В статье обоснована актуальность задачи автоматической стыковки автономных мобильных роботов. На конкретных примерах показано, что реализация функций автоматической стыковки автономных роботов открывает перспективы создания многоагентных систем с трансформируемой структурой. Целью работы является разработка средств автоматической стыковки автономных мобильных роботов, функционирующих в условиях сложных сцен и неопределенности окружающей обстановки.
Методы. Предлагаемый подход к автоматизации стыковки автономных мобильных роботов сводится к модификации метода поисковых случайных деревьев со встречным ростом на основе параллельного выполнения децентрализованного алгоритма планирования маршрутов с взаимной координацией процессов распределенных вычислений. Оценка эффективности разработанного комплекса алгоритмических и программных средств осуществлялась с помощью методов компьютерного и натурного моделирования. Заключительная серия натурных экспериментов проводилась на примере автоматической стыковки автономных робототехнических платформ «JetBot AI kit Nvidia», выполняемой с привлечением средств и методов интеллектуального управления, визуальной навигации, технического зрения и беспроводной сетевой связи.
Результаты. Проведен анализ особенностей автоматической стыковки, как одной из задач группового управления автономными роботами в составе многоагентных систем, способных реконфигурировать свою структуру для целенаправленного изменения имеющегося набора функциональных свойств и возможностей прикладного применения. Предложена децентрализованная модификация метода поисковых случайных деревьев со встречным ростом, позволяющая обеспечить планирование перемещений автономных мобиль ных роботов по ходу их взаимного сближения и последующей стыковки. Разработан комплекс программноалгоритмических средств автоматизации стыковки автономных роботов. Проведены серии модельных и натурных экспериментов, подтвердивших эффективность развиваемого подхода.
Выводы. Представленная модификация метода поисковых случайных деревьев со встречным ростом, традиционно применяемого для планирования перемещений манипуляторов и подвижных платформ, дополняет состав решаемых им задач, позволяя обеспечить автоматизацию стыковки автономных роботов. Полученные результаты открывают перспективы создания универсальных планировщиков с расширенным функционалом для систем управления автономными роботами.
- Проведено моделирование распространения акустического сигнала в многослойных печатных платах в исправном и неисправном (с прямоугольным дефектом в виде расслоения) состояниях, которое показало различие полученных сигналов в точке установки датчика.
- Проведены экспериментальные исследования с целью изучения применимости метода акустической эмиссии для выявления дефектов различного размера и количества.
Цели. При производстве многослойных печатных плат (МПП) в процессе ламинирования в них могут возникать дефекты в виде расслоений. Они не обнаруживаются оптическими и электрическими методами выходного контроля, но в процессе эксплуатации радиоэлектронного средства могут вызвать нарушения механического режима работы и привести к отказам. Для обнаружения таких дефектов предлагается использовать метод акустической эмиссии (АЭ), основанный на возникновении и распространении акустических волн в МПП, вызванных наличием дефектов. Целью данного исследования является изучение возможности использования метода АЭ для обнаружения дефектов МПП, возникающих, в частности, в процессе ламинирования.
Методы. Для исследования распространения акустических сигналов в МПП при наличии дефектов использовались программа моделирования механических процессов (для исследования на модели МПП) и различные образцы двухслойных печатных плат с заранее внесенными дефектами (для экспериментальных исследований). В качестве источника акустических сигналов использовался соленоид, установленный на МПП, а для приема сигналов – пьезоэлектрический датчик. Обработка данных проводилась путем сравнения сигналов АЭ, полученных для исправного образца МПП и для образцов МПП с дефектами.
Результаты. Проведено моделирование распространения акустического сигнала в МПП в исправном и неисправном (с прямоугольным дефектом в виде расслоения) состояниях, которое показало различие полученных сигналов в точке установки датчика. Также были проведены экспериментальные исследования с целью изучения применимости метода АЭ для выявления дефектов различного размера и количества.
Выводы. Исследования показали, что метод АЭ позволяет достаточно эффективно и достоверно обнаруживать наличие дефектов в МПП, возникающих в процессе ламинирования. В данном исследовании предлагается новый подход к неразрушающему контролю МПП с использованием метода АЭ, который может значительно повысить надежность МПП и эффективность процессов их производства.
СОВРЕМЕННЫЕ РАДИОТЕХНИЧЕСКИЕ И ТЕЛЕКОММУНИКАЦИОННЫЕ СИСТЕМЫ
- Разработана программная архитектура многофункционального аудиомодуля на ADSP-процессоре ADAU1701 для тестирования и отладки медиаустройств в заданном спектрально-динамическом диапазоне.
- Балансная маршрутизация в 20 раз снижает влияние наводимых на аудиоканал шумов, что позволяет калибровать звукоснимающие аудиоустройства.
Цели. Цель статьи – программно-архитектурная разработка и параметрический анализ многофункционального аудиомодуля на базе ADSP-процессора (audio digital signal processor) ADAU1701 в среде SigmaStudio для тестирования аудиоустройств в следующих режимах: маршрутизация балансных и небалансных аудиоканалов по дифференциальной схеме «Di-Box/R Di-Box»; пространственно-временная и динамическая аудиообработка; трехполосное моноканальное кросс-разделение с независимой эквализацией; коррекция амплитудно-частотной характеристики (АЧХ) аудиоканала со следящим режекторным автоподавлением электроакустической положительной обратной связи (ПОС) в заданной спектральной полосе.
Методы. Использованы методы визуально-графического архитектурного программирования аудиомодулей в программных средствах SigmaStudio и Flowstone, алгоритмы сигнальных аудиоизмерений и анализа экспериментальных данных в REW и Soundcard Oscilloscope.
Результаты. Исследованы характеристики схемы «Di-Box/R Di-Box» для оценки влияния дифференциального преобразования сигнала на отношение сигнал/шум в аудиоканале. Приведены характеристики субмодулей реверберации и сатурации. Показано влияние режимов эквализации на коррекцию АЧХ студийного аудиомонитора. Исследовано воздействие аудиокомпрессора на динамический диапазон и уровень выходного сигнала. Проведены результаты экспериментального исследования субмодуля компенсационной коррекции АЧХ аудиомонитора при помощи согласованной фильтрации, а также получены спектральные характеристики субмодуля автоподавления электроакустической ПОС.
Выводы. Разработана программная архитектура многофункционального аудиомодуля на ADSP-процессоре ADAU1701 для тестирования и отладки медиаустройств в заданном спектрально-динамическом диапазоне. Балансная маршрутизация в 20 раз снижает влияние наводимых на аудиоканал шумов, что позволяет калибровать звукоснимающие аудиоустройства. Субмодуль аудиообработки обеспечивает компрессионную характеристику с динамическим диапазоном от −27 до 18.6 дБ с возможностью эквализационной параметризации в диапазоне 0.04–18 кГц; реверберационную характеристику в диапазоне 0.5–3000 мс; аудиоканальное кросс-разделение на 3 частотных поддиапазона с регулировкой АЧХ в динамическом диапазоне от −30 до 30 дБ. Субмодуль автокоррекции АЧХ позволяет снизить на 40 дБ динамическую неравномерность АЧХ. Субмодуль автоподавления электроакустической ПОС обеспечивает режекторное формантоподавление до −100 дБ при входном динамическом диапазоне от −50 до 80 дБ.
- Исследование показало, что разбаланс квадратурных опорных колебаний может привести к существенному снижению помехоустойчивости радиосистем, использующих сигналы с амплитудно-фазовой манипуляцией. Минимальные энергетические потери из-за разбаланса квадратурных опорных колебаний достигаются при значении разбаланса менее 10% по амплитуде и 2°–3° по фазе.
- Амплитудный разбаланс квадратурных опорных колебаний при приеме сигналов с квадратурной амплитудной модуляцией сказывается сильнее, чем при приеме сигналов с амплитудно-фазовой манипуляцией.
- Фазовый разбаланс сказывается приблизительно одинаково.
Цели. В настоящее время сигналы с амплитудно-фазовой манипуляцией (АФМ) активно используются в системах спутниковой связи и, особенно, в системах, работающих в условиях ограниченности спектра радиочастот с повышенными требованиями к качеству передачи данных. В этих системах применяются приемники многоканального типа с принятием решения о принимаемом символе по максимуму правдоподобия (корреляционный приемник) или приемники квадратурного типа. Помехоустойчивость этих приемников напрямую зависит от качества формирования опорных колебаний: для корреляционных приемников – эталонных сигналов, а для квадратурных приемников – синфазной и квадратурной составляющих. Цель работы – анализ влияния разброса амплитудных и фазовых параметров синфазного и квадратурного канала на помехоустойчивость приема сигналов АФМ с круговой формой сигнального созвездия.
Методы. Использованы методы статистической радиотехники, теории оптимального приема сигналов и компьютерного моделирования.
Результаты. Получены характеристики помехоустойчивости приема сигналов АФМ в зависимости от разброса параметров квадратурного преобразователя. Теоретические расчеты подтверждены результатами имитационного моделирования при передаче АФМ-сигналов в гауссовском канале связи. Проведено сравнение с системами, использующими сигналы с квадратурной амплитудной модуляцией (КАМ).
Выводы. Проведенные исследования показали, что разбаланс квадратурных опорных колебаний может привести к существенному снижению помехоустойчивости радиосистем, использующих АФМ-сигналы. Минимальные энергетические потери из-за разбаланса квадратурных опорных колебаний достигаются при значении разбаланса менее 10% по амплитуде и 2°–3° по фазе. Амплитудный разбаланс квадратурных опорных колебаний при приеме сигналов КАМ сказывается сильнее, чем при приеме сигналов АФМ. Фазовый разбаланс сказывается приблизительно одинаково.
- Получена предельная непрерывная математическая модель DC/DC-преобразователя, построенного по топологии SEPIC, которая позволяет оценить зависимость токов, протекающих через обмотки дросселей, и напряжения на конденсаторах от ряда параметров.
- Фазовые координаты математической модели стремятся к значениям реальных токов и напряжений преобразователя при частоте коммутации силового ключа более 200 кГц.
Цели. DC/DC-преобразователь, построенный по топологии SEPIC, является униполярным электронным устройством, которое обеспечивает преобразование входного положительного напряжения в стабилизированное выходное напряжение той же полярности с возможностью его регулирования как ниже входного напряжения, так и выше. Цель статьи – выполнить анализ DC/DC-преобразователя в обеих фазах его работы. Для каждой из фаз необходимо составить эквивалентные схемы и получить характеризирующие дифференциальные уравнения с помощью правил Кирхгофа. Каждую систему дифференциальных уравнений нужно привести к виду Коши для дальнейшего преобразования в предельную непрерывную математическую модель, а каждую систему уравнений преобразовать в матричный вид и впоследствии объединить в единую матричную систему.
Методы. Задача построения предельной непрерывной математической модели решена с использованием правил Кирхгофа. Для компьютерного моделирования была применена программа Multisim. Это позволило сопоставить результаты расчета постоянных токов и напряжений и моделирования.
Результаты. Показано, что фазовые координаты математической модели стремятся к значениям реальных токов и напряжений преобразователя при частоте коммутации силового ключа более 200 кГц. Установлено достаточно хорошее соответствие расчетных значений токов и напряжений и их значений, полученных с помощью моделирования (при вариации коэффициента заполнения и частоты коммутации).
Выводы. Полученная предельная непрерывная математическая модель DC/DC-преобразователя, построенного по топологии SEPIC, позволяет оценить зависимость токов, протекающих через обмотки дросселей, и напряжения на конденсаторах от ряда параметров. Предельная непрерывная математическая модель DC/DC-преобразователя, построенного по топологии SEPIC, является базой его схемотехнического проектирования и физико-математического анализа.
АНАЛИТИЧЕСКОЕ ПРИБОРОСТРОЕНИЕ И ТЕХНОЛОГИИ
- Представлены теоретические основы управления электродвигателями винтомоторной группы. Предложены структурная схема реализации регулятора, методики коммутации обмоток при управлении с трапецеидальным сигналом, представлены осциллограммы сигналов.
- На базе теоретических изысканий разработан инвариантный алгоритмический аппарат построения программного обеспечения для различных типов микроконтроллеров.
- Представлены блок-схемы основных модулей программного средства: алгоритмов событийной коммутации и основного бесконечного цикла микроконтроллера.
- Формализованы требования к микроконтроллерам для создания различных типов регуляторов оборотов, представленные в виде набора математических выражений.
Цели. Высокая востребованность и эффективность беспилотных воздушных судов делают актуальным производство их компонентов, одним из которых является регулятор скорости вращения бесщеточного электродвигателя винтомоторной группы. Однако российская промышленность в настоящее время не производит их серийно. Для запуска производства необходимо разработать методики и алгоритмы управления для аппаратной и программной частей устройств данного типа, а также формализовать критерии выбора основных компонентов. Целью работы является создание методики программного управления электродвигателем, включающее структурные схемы, инвариантные алгоритмы и методики расчетного выбора параметров основного микроконтроллера регулятора оборотов.
Методы. Использованы методы алгоритмизации, экспертных оценок, линейных вычислительных процессов и экспериментальных исследований.
Результаты. Представлены теоретические основы управления электродвигателями винтомоторной группы. Предложены структурная схема реализации регулятора, методики коммутации обмоток при управлении с трапецеидальным сигналом, представлены осциллограммы сигналов. На базе теоретических изысканий разработан инвариантный алгоритмический аппарат построения программного обеспечения для различных типов микроконтроллеров. Представлены блок-схемы основных модулей программного средства: алгоритмов событийной коммутации и основного бесконечного цикла микроконтроллера. Формализованы требования к микроконтроллерам для создания различных типов регуляторов оборотов, представленные в виде набора математических выражений. Они позволяют выполнить расчет количества необходимых периферийных устройств и портов микроконтроллера согласно требованиям к регулятору, а также вычислительной мощности используемого ядра.
Выводы. Экспериментальные исследования показали достоверность представленных теоретических изысканий. Полученные результаты могут быть использованы для подбора оптимальной элементной базы и разработки программного обеспечения для регуляторов скорости вращения электродвигателей винтомоторной группы беспилотных воздушных судов.
- При регистрации сигналов мозговой активности с помощью электроэнцефалографии необходимо уменьшить влияние помех.
- С помощью предложенной схемы лапласиановского монтажа обеспечивается высокий уровень подавления помеховых сигналов, источники которых находятся далеко за пределами проекции электродного комплекса.
- Комплекс, состоящий из 16 + 1 отдельных электродов, является наиболее предпочтительным для использования.
Цели. Одной из актуальных задач, возникающих при регистрации сигналов мозговой активности с помощью электроэнцефалографии (ЭЭГ), является уменьшение влияния помех (артефактов). В данном исследовании рассматривается один из способов решения данной задачи с помощью дифференциального оператора Лапласа. Цель работы – определение количества электродов, входящих в лапласиановский монтаж, а также выяснение требований к геометрической форме их расположения для обеспечения наилучшего качества обработки сигналов ЭЭГ.
Методы. Метод лапласиановского монтажа основывается на использовании отдельных электродов для определения второй производной сигнала, которая пропорциональна электрическому току в соответствующей точке поверхности головы. Этот подход позволяет оценить потенциал нейронной активности источника, находящегося в малой области, ограниченной комплексом электродов. При использовании небольшого количества равноудаленных электродов вокруг целевого электрода при лапласиановском монтаже удается получить значительно более качественный сигнал из области, находящейся под электродным комплексом. Результаты. Для всех рассмотренных в статье способов построения лапласиановского монтажа, было показано, что комплекс, состоящий из 16 + 1 отдельных электродов, является наиболее предпочтительным для использования. Выбор схемы 16 + 1 обусловлен наилучшим компромиссом между качеством обработки сигналов ЭЭГ и сложностью изготовления электродного комплекса при заданных геометрических параметрах. Оценка качества проводилась моделированием сигнала помехи, с помощью чего удалось оценить правильность выбора схемы построения монтажа.
Выводы. Установлено, что применение метода лапласиановского монтажа способно значительно уменьшить влияние артефактов. С помощью предложенной схемы монтажа обеспечивается высокий уровень подавления помеховых сигналов, источники которых находятся далеко за пределами проекции электродного комплекса. Однако не все помехи, источники которых лежат в глубине мозга, могут быть эффективно подавлены с помощью одной лишь схемы лапласиановского монтажа. Необходимо использовать различные цифровые методы обработки сигналов, учитывающие их статистические свойства.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
- При использовании беггинга лучшие результаты получены при моделировании сезонных временных рядов.
- Качество прогнозов моделей беггинга несколько уступает качеству прогнозов нейросетевых моделей, но оказывается на том же уровне, что у стандартных моделей ARIMA и ETS.
- Модели на основе беггинга следует использовать для моделирования временных рядов.
Цели. Цель работы состоит в построении различных моделей беггинга, сопоставлении точности их прогнозов на тестовый период со стандартными моделями и получении выводов о возможности дальнейшего использования техники беггинга при моделировании временных рядов.
Методы. Исследуется применение беггинга к случайной составляющей временного ряда, формируемой после удаления тренда и сезонной части. Строится серия псевдовыборок, совмещающихся в новую случайную составляющую. На основе полученной компоненты строится новая модель ряда. По мнению многих авторов такой подход позволяет повысить точность модели временного ряда, лучшим образом оценив распределение.
Результаты. В теоретической части приведены характеристики различных моделей беггинга. Разница между ними сводится к оценке смещения, получаемой из-за того, что измерения, которые составляют псевдовыборки, не являются случайными. Представлен вычислительный эксперимент, в котором модели временных рядов строятся по индексу денежных доходов населения макроэкономической статистики Российской Федерации и по курсу акций Сбербанка. Прогнозы на тестовый период, полученные стандартными, нейросетевыми моделями и моделями на основе беггинга для некоторых временных рядов, сравниваются в вычислительном эксперименте. В самой простой реализации беггинг показал результаты, сравнимые со стандартными моделями ARIMA и ETS и несколько уступающие нейросетевым моделям для сезонных рядов; для несезонных рядов лучшие результаты дали стандартные модели ARIMA и ETS, модели беггинга дали близкие результаты. Обе группы моделей существенно превзошли результат нейросетевых моделей.
Выводы. При использовании беггинга лучшие результаты получены при моделировании сезонных временных рядов. Качество прогнозов моделей беггинга несколько уступает качеству прогнозов нейросетевых моделей, но оказывается на том же уровне, что у стандартных моделей ARIMA и ETS. Модели на основе беггинга следует использовать для моделирования временных рядов, различные функции над значениями ряда при построении псевдовыборок должны быть исследованы в дальнейшей работе.
- Разработаны новая математическая модель и алгоритм оптимизации параметров составного сплайна, состоящего из дуг окружностей, сопрягаемых клотоидами и прямыми.
- Эта математическая модель в виде модифицированной функции Лагранжа и специальный алгоритм нелинейного программирования используются ля оптимизации параметров сплайна.
- При этом удается вычислять аналитически производные целевой функции по параметрам сплайна при отсутствии ее аналитического выражения через эти параметры.
Цели. Цель работы состоит в развитии теории сплайн-аппроксимации последовательности точек на плоскости на случай использования составных сплайнов сложной структуры. В отличие от простого, например, полиномиального сплайна, составной сплайн содержит повторяющиеся связки нескольких элементов. Такая задача возникает в проектировании трасс железных и автомобильных дорог. План (проекция на горизонтальную плоскость) такой трассы – это кривая, состоящая из повторяющейся связки элементов «прямая ++ клотоида + окружность + клотоида …», что обеспечивает непрерывность не только кривой и касательной, но и кривизны. Число элементов сплайна неизвестно и должно определяться в процессе решения проектной задачи. Алгоритм решения задачи применительно к сплайну, состоящему из дуг окружностей, сопрягаемых прямыми, реализован и опубликован ранее. Аппроксимирующий сплайн в общем случае – многозначная функция. На координаты точек ее графика могут накладываться ограничения. Еще одним существенным фактором, усложняющим задачу, является наличие клотоид, которые не выражаются аналитически (формулой). Алгоритм определения числа элементов сплайна с клотоидами и построения начального приближения опубликован ранее. В настоящей статье рассматривается следующий этап решения задачи – оптимизация с применением нелинейного программирования сплайна, полученного на первом этапе по методу динамического программирования.
Методы. Для оптимизации параметров сплайна используется новая математическая модель в виде модифицированной функции Лагранжа и специальный алгоритм нелинейного программирования. При этом удается вычислять аналитически производные целевой функции по параметрам сплайна при отсутствии ее аналитического выражения через эти параметры.
Результаты. Разработаны математическая модель и алгоритм оптимизации параметров составного сплайна, состоящего из дуг окружностей, сопрягаемых клотоидами и прямыми.
Выводы. Предложенная ранее двухэтапная схема проектирования плана трасс линейных сооружений пригодна и при использовании составных сплайнов с клотоидами.
УПРАВЛЕНИЕ КАЧЕСТВОМ ПРОДУКЦИИ. СТАНДАРТИЗАЦИЯ
- Отклонения угловой зависимости чувствительности УФ-радиометров бактерицидного излучения от косинусной характеристики приводят к существенному занижению результатов измерений энергетической освещенности от протяженных излучателей.
- Эффективным решением проблемы является использование коэффициентов цифровой угловой коррекции чувствительности средств измерений энергетической освещенности бактерицидного излучения, определяемых при испытаниях.
Цели. Контроль качества средств измерений бактерицидной освещенности ультрафиолетового (УФ) излучения основан на исследовании основных метрологических характеристик, включающих угловую и спектральную чувствительность, диапазон линейности, абсолютную калибровку в единицах энергетической освещенности. Наибольшее влияние на предел допускаемой погрешности оказывают отклонения угловой чувствительности средств измерений от идеальной косинусной характеристики, приводящие к искажению результатов измерений и существенной разнице в показаниях приборов. Целью работы является повышение точности средств измерений при решении метрологических задач определения энергетической освещенности бактерицидного излучения.
Методы. Эффективным методом решения проблемы является введение коэффициентов коррекции угловой чувствительности радиометров, спектрорадиометров и дозиметров, значения которых рассчитываются по результатам измерений чувствительности на гониометре при испытаниях средств измерений. Большую роль играет использование компьютерных моделей и цифровых двойников средств измерений на основе результатов исследований метрологических характеристик радиометров с использованием программного обеспечения, включающего моделирование измерительной задачи.
Результаты. Исследование угловой зависимости чувствительности бактерицидных УФ-радиометров на гониометре и анализ результатов измерений, полученных другими авторами, позволяют по отклонению угловой чувствительности средств измерений энергетической освещенности бактерицидного излучения от стандартной косинусной зависимости определить значение коэффициентов коррекции угловой чувствительности.
Выводы. Отклонения угловой зависимости чувствительности УФ-радиометров бактерицидного излучения от косинусной характеристики приводят к существенному занижению результатов измерений энергетической освещенности от протяженных излучателей. Эффективным решением проблемы является использование коэффициентов цифровой угловой коррекции чувствительности средств измерений энергетической освещенности бактерицидного излучения, определяемых при испытаниях. При оценке качества радиометров, спектрорадиометров и дозиметров бактерицидного излучения неполный контроль основных метрологических характеристик средств измерений создает риски серьезных ошибок в результатах измерений энергетической бактерицидной освещенности.

ISSN 2500-316X (Online)



























