


ИНФОРМАЦИОННЫЕ СИСТЕМЫ. ИНФОРМАТИКА. ПРОБЛЕМЫ ИНФОРМАЦИОННОЙ БЕЗОПАСНОСТИ
- В статье рассматривается новый способ формирования клавиатурного почерка при использовании сенсорной клавиатуры для аутентификации в существующих на данный момент мобильных системах.
- Показано, что силы нажатия и промежуточного интервала достаточно для получения необходимых характеристик, позволяющих сформировать уточненный портрет пользователя по его клавиатурному почерку.
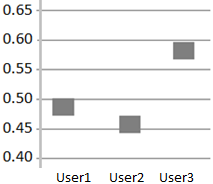
- Приведены экспериментальные статистические данные отдельно среднего выборки для трех различных пользователей согласно силе нажатия, а также результаты аутентификации при использовании одновременно среднеквадратичных отклонений силы нажатий и интервалов между ними при использовании сенсорной клавиатуры для платформы iOSXcode.
Цели. В статье рассматривается новый способ формирования клавиатурного почерка при использовании сенсорной клавиатуры для аутентификации в существующих на данный момент мобильных системах.
Методы. В силу недостаточной надежности отдельно взятой парольной аутентификации предлагается использовать ее комбинацию с характеристиками, которые соответствуют почерку на мобильных устройствах. В статье продемонстрирована возможность использования индивидуальных характеристик пользователя при формировании клавиатурного почерка на устройствах с сенсорной клавиатурой. Показано, что тип используемой клавиатуры влияет на характеристики клавиатурного почерка, поэтому данный аспект можно использовать для повышения надежности парольной аутентификации. Предлагается дополнить процесс аутентификации в информационной среде данными о характере воздействия на сенсорную клавиатуру. Интерес представляет использование встроенной функции 3D Touch, которая доступна при работе на мобильных устройствах и технике, оснащенной сенсорной клавиатурой. В статье продемонстрировано, что использования только одного параметра недостаточно для точной аутентификации. Предложен способ определения допустимого диапазона погрешности, в который должны укладываться как сила нажатия, так и промежуточный интервал при проведении аутентификации. Для этого используется функция Лапласа, позволяющая сформировать интервал каждой характеристики в зависимости от требуемой вероятности распознавания пользователя.
Результаты. Показано, что силы нажатия и промежуточного интервала достаточно для получения необходимых характеристик, позволяющих сформировать уточненный портрет пользователя по его клавиатурному почерку. Приведены экспериментальные статистические данные отдельно среднего выборки для трех различных пользователей согласно силе нажатия, а также результаты аутентификации при использовании одновременно среднеквадратичных отклонений силы нажатий и интервалов между ними при использовании сенсорной клавиатуры для платформы iOSXcode.
Выводы. Сделан вывод о возможности применения способа аутентификации пользователей по клавиатурному почерку, сформированному на основе одновременно силы нажатий на символы клавиатуры и интервалов между нажатиями. Использование значений среднего выборки и среднеквадратичных отклонений позволяет проводить аутентификацию согласно требуемой вероятности распознавания.
РОБОТИЗИРОВАННЫЕ КОМПЛЕКСЫ И СИСТЕМЫ. ТЕХНОЛОГИИ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ
- Целью работы является оценка перспектив использования метода поисковых случайных деревьев в качестве конструктивной основы для создания универсального планировщика перемещений мобильных и манипуляционных роботов, включая автономные робототехнические системы с манипулятором на подвижной платформе.
- Эффективность прикладного применения метода поисковых случайных деревьев подтверждается примерами моделирования мобильной платформы с бортовым манипулятором и результатами натурных экспериментов с опытным образцом реконфигурируемого мехатронно-модульного робота «АРАКС»
Цели. Статья посвящена анализу особенностей одного из наиболее многообещающих подходов к решению задач планирования перемещений автономных роботов различных типов и назначения с помощью метода поисковых случайных деревьев. Показано, что развитие современной робототехники неразрывно сопряжено с совершенствованием конструкций создаваемых образцов, для которых размещение манипулятора на подвижной платформе становится типовым вариантом компоновки. Целью работы является оценка перспектив использования метода поисковых случайных деревьев в качестве конструктивной основы для создания универсального планировщика перемещений мобильных и манипуляционных роботов, включая автономные робототехнические системы с манипулятором на подвижной платформе.
Методы. Объектом проводимых исследований является метод поисковых случайных деревьев RRT (rapidly exploring random trees) и его известные модификации RRT* и RRT-Connect. Оценка эффективности их прикладного применения для решения задач планирования перемещений роботов различных типов проводилась с помощью методов компьютерного и натурного моделирования.
Результаты. На основе обзора литературы и по итогам проведенных исследований показано, что широкие возможности метода поисковых случайных деревьев позволяют обеспечить решение задач планирования перемещений не только для мобильных и манипуляционных роботов, но и для робототехнических систем с размещением бортового манипулятора (в т.ч. с избыточной или реконфигурируемой структурой) на транспортной платформе. Эффективность прикладного применения метода поисковых случайных деревьев подтверждается примерами моделирования мобильной платформы с бортовым манипулятором и результатами натурных экспериментов с опытным образцом реконфигурируемого мехатронно-модульного робота «АРАКС» (РТУ МИРЭА, Россия). Экспериментально установлено и теоретически обосновано, что конечная размерность дерева поиска, а, следовательно, и время его построения, вплоть до достижения заданного целевого состояния, во многом определяются величиной фактора роста.
Выводы. Обобщение полученных результатов открывает реальные перспективы использования метода поисковых случайных деревьев в качестве конструктивной основы не только для создания универсальных средств планирования перемещений мобильных робототехнических систем с бортовым манипулятором, но и для решения задач автоматизации стыковки автономных подвижных платформ.
СОВРЕМЕННЫЕ РАДИОТЕХНИЧЕСКИЕ И ТЕЛЕКОММУНИКАЦИОННЫЕ СИСТЕМЫ
- Цель работы состоит в определении допустимых значений амплитуд виброускорений печатных узлов (ПУ), с которыми будут сравниваться измеренные значения амплитуд виброускорений, полученные в результате испытаний ПУ на воздействие гармонической вибрации.
- Для расчета допустимых отклонений виброускорений использовался метод имитационного моделирования Монте-Карло, заключающийся в многократном расчете значений амплитуд виброускорений при случайных значениях физико-механических параметров материалов и геометрических параметров конструкции ПУ в пределах своих допусков.
- С помощью программы моделирования механических процессов SolidWorks определены значения допуска на виброускорения ПУ в контрольной точке на первой резонансной частоте и получены экспериментальные данные при внесении различных дефектов.
Цели. При производстве и эксплуатации печатных узлов (ПУ) радиоэлектронных средств (РЭС) используются различные методы контроля технического состояния. Основные из них – это оптический, электрический и тепловой. Но не все возможные дефекты выявляются с использованием указанных методов. Например, ослабленное крепление ПУ в блоке или некорректная установка электрорадиоэлемента (ЭРЭ) на печатной плате выявляются только путем анализа механических характеристик РЭС, в частности значений амплитуд виброускорений на ЭРЭ или в выбранных контрольных точках печатной платы (далее – амплитуда виброускорения ПУ). Чтобы сделать вывод о наличии дефекта, измеренные значения амплитуд виброускорений, полученные в результате испытаний ПУ на воздействие гармонической вибрации, сравниваются с допустимыми значениями, рассчитанными при имитационном моделировании механических процессов в ПУ с учетом разбросов физико-механических параметров материалов и геометрических параметров конструкции ПУ. Цель работы состоит в определении допустимых значений амплитуд виброускорений ПУ, с которыми будут сравниваться измеренные значения.
Методы. Для расчета допустимых отклонений виброускорений предлагается использование метода имитационного моделирования Монте-Карло, заключающегося в многократном расчете значений амплитуд виброускорений при случайных значениях физико-механических параметров материалов и геометрических параметров конструкции ПУ в пределах своих допусков.
Результаты. В результате экспериментальной проверки описанного метода с помощью программы моделирования механических процессов SolidWorks определены значения допуска на виброускорения ПУ в контрольной точке на первой резонансной частоте и получены экспериментальные данные при внесении различных дефектов. Результаты сравнения измеренных значений с рассчитанным допуском позволяют сделать вывод о возможности обнаружения дефектов ПУ.
Выводы. Использование данного метода расчета допусков на амплитуду виброускорения ПУ позволяет определять наличие дефектов в РЭС, которые не влияют на электрические или тепловые характеристики РЭС, и таким образом повысить эффективность контроля технического состояния.
- Цель работы – снижение влияния эффекта многолучевого распространения радиоволн в канале связи в сложных помеховых условиях.
- Приведена модель приемной многоэлементной пространственно-распределенной синфазной антенны разной конфигурации с электронно-регулируемой диаграммой направленности, предназначенной для борьбы с многолучевым характером распространения сигнала.
- Проведено моделирование многолучевого канала связи при наличии одного основного и трех отраженных лучей распространения радиоволн, а также с гармонической помехой при двух углах ее прихода и разной частотной расстройкой относительно частоты полезного сигнала.
Цели. Радиотехнические системы передачи информации находят широкое применение в различных отраслях нашей жизни не только для обеспечения телекоммуникаций и бытовых потребностей человека, но и для функционирования различных спецслужб, например, служб МЧС, которые в своей работе применяют роботизированные комплексы. В случае чрезвычайного происшествия возможно попадание такого робота под завал, в железобетонные трубы или другие коммунальные объекты, в результате чего условия распространения радиоволн резко ухудшаются. В этой связи остро стоит вопрос обеспечения надежной связи с роботизированным комплексом. Цель работы – снижение влияния эффекта многолучевого распространения радиоволн в канале связи в сложных помеховых условиях.
Методы. Использованы методы статистической радиотехники, теории оптимального приема сигналов и математического моделирования.
Результаты. Приведена модель приемной многоэлементной пространственно-распределенной синфазной антенны разных конфигураций с электронно-регулируемой диаграммой направленности, предназначенной для борьбы с многолучевым характером распространения сигнала. Проведено моделирование многолучевого канала связи при наличии одного основного и трех отраженных лучей распространения радиоволн, а также с гармонической помехой при двух углах ее прихода и разной частотной расстройкой относительно частоты полезного сигнала. Оценена вероятность битовой ошибки при приеме дискретной информации с применением предложенной антенны.
Выводы. Применение предложенного алгоритма обработки сигналов на приемной стороне позволяет частично скомпенсировать влияние эффекта многолучевости. В результате помехоустойчивость приема информации по сравнению с приемом на всенаправленную антенну с одним антенным элементом повышается: для вероятности битовой ошибки 10−3 энергетический выигрыш составляет от 2 дБ при 2 лучах до 7–10 дБ при 3–4 лучах. При наличии в радиоканале сосредоточенной гармонической помехи также наблюдается ее одновременная пространственная (с использованием антенны) и спектральная (с использованием демодулятора) фильтрация, эффективность которой зависит от направления прихода и частотной расстройки помехи, что также приводит к существенному снижению вероятности ошибки.
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
- Разработана математическая модель для определения зависимостей между вектором состояния спутника, вектором состояния снимаемой точки на земной поверхности и полями распределений векторов скоростей и ускорений движения изображения по фокальной плоскости оптико-электронной аппаратуры.
- Предложенная математическая модель может найти применение как на этапе проектирования спутника с оптико-электронной аппаратурой при моделировании режимов съемки и оценках смещений изображения, так и на этапе эксплуатации спутника при применении представленной модели в бортовом программном обеспечении спутника.
Цели. В статье рассматривается спутник с оптико-электронной аппаратурой, предназначенной для съемки поверхности Земли. Цель статьи – разработка математической модели для определения зависимостей между вектором состояния спутника, вектором состояния снимаемой точки на земной поверхности и полями распределений векторов скоростей и ускорений движения изображения по фокальной плоскости оптикоэлектронной аппаратуры.
Методы. Используемый метод основан на двойном дифференцировании уравнения фотограмметрии при применении его к съемке поверхности Земли из космоса. Для построения модели орбитального и углового движений спутника применяются дифференциальные уравнения с численным интегрированием. Параметры вращения Земли и движения земной поверхности вычисляются на основе библиотеки программ Standards of Fundamental Astronomy.
Результаты. Получены дифференциальные уравнения движения изображения. Проведена верификация разработанной математической модели. Проведено моделирование движения спутника в режиме орбитальной ориентации и в режиме компенсации скорости движения изображения. Построены поля распределения векторов скоростей и ускорений движения изображения поверхности Земли. Исследовано остаточное поле движения изображения после компенсации.
Выводы. Предложенная математическая модель может найти применение как на этапе проектирования спутника с оптико-электронной аппаратурой при моделировании режимов съемки и оценках смещений изображения, так и на этапе эксплуатации спутника при применении представленной модели в бортовом программном обеспечении спутника. Представленные зависимости также можно использовать для построения матрицы сдвига изображения в задачах восстановления изображения и получения сверхразрешения.
- Исследованы зависимости, связывающие характеристики оврагов, т.е. участков рельефа минимизируемой функции, на которых ее изменение по одному из направлений значительно медленнее, чем по другим направлениям, с погрешностью определения координат ее минимума.
- Установлено наличие линейной зависимости между логарифмами степени овражности и погрешности определения координат минимума функции.
- Найденные зависимости можно использовать для оценки ожидаемой погрешности определения координат экстремумов оптимизируемых функций.
Цели. Целью работы было исследование зависимостей, связывающих характеристики оврагов, т.е. участков рельефа минимизируемой функции, на которых ее изменение по одному из направлений значительно медленнее, чем по другим направлениям, с погрешностью определения координат ее минимума.
Методы. В экспериментах использовалась специально разработанная тестовая функция с изменяемыми в широких пределах параметрами овражности. В сериях опытов случайно задавались положение и параметры оврага и координаты стартовой точки поиска. Размерность и степень овражности оценивались по собственным числам аппроксимированного гессиана функции в точке окончания поиска минимума. Погрешность определялась как эвклидово расстояние между заданным положением минимума функции и конечной точкой поиска. Для статистической обработки результатов применены линейный регрессионный анализ и аппроксимация с помощью модели искусственной нейронной сети (ИНС).
Результаты. Установлено наличие линейной зависимости между логарифмами степени овражности и погрешности определения координат минимума функции. Коэффициент детерминации R2 ~ 0.88. Дополнительный учет эвклидовой нормы градиента функции в точке окончания поиска позволил повысить коэффициент детерминации до R2 ~ 0.95, а при использовании модели ИНС – до R2 ~ 0.97.
Выводы. Найденные зависимости можно использовать для оценки ожидаемой погрешности определения координат экстремумов оптимизируемых функций. В дальнейшем необходимо расширить методику на функции с размерностью оврагов более единицы и на другие типы сложных для алгоритмов оптимизации участков рельефа.
В исследовании показано, что определитель Вронского системы решений линейного однородного уравнения в ситуации, когда число решений меньше порядка уравнения, служит индикатором линейной зависимости или независимости этой системы: решения линейно зависимы тогда и только тогда, когда их определитель Вронского тождественно равен нулю. При этом нет необходимости проверять обращение определителя в нуль на всей области определения, достаточно сделать это на произвольно выбранном интервале или даже на произвольно выбранном множестве, имеющем предельную точку.
Цели. Целью работы является изучение свойств определителя Вронского системы решений линейного однородного дифференциального уравнения в случае, когда число решений меньше порядка уравнения, и сравнение их с известными свойствами такого же определителя, но в случае равенства числа решений порядку уравнения.
Методы. В работе использованы методы линейной алгебры и теории обыкновенных дифференциальных уравнений, а также математического и комплексного анализа.
Результаты. Показано, что обращение в нуль рассматриваемого определителя на сколь угодно малом интервале влечет за собой обращение его в нуль на всей области определения, а решения при этом оказываются линейно зависимыми. В трех случаях: 1) если коэффициенты уравнения являются аналитическими функциями, 2) если число решений равно единице и 3) если число решений на единицу меньше порядка уравнения – получен более сильный результат. Именно, если множество нулей рассматриваемого определителя Вронского имеет предельную точку, принадлежащую области определения решений, то определитель тождественно равен нулю и решения линейно зависимы.
Выводы. Полученные результаты означают, что определитель Вронского системы решений линейного однородного уравнения в ситуации, когда число решений меньше порядка уравнения, служит индикатором линейной зависимости или независимости этой системы: решения линейно зависимы тогда и только тогда, когда их определитель Вронского тождественно равен нулю. При этом нет необходимости проверять обращение определителя в нуль на всей области определения, достаточно сделать это на произвольно выбранном интервале или даже (в перечисленных выше частных случаях) на произвольно выбранном множестве, имеющем предельную точку.
ЭКОНОМИКА НАУКОЕМКИХ И ВЫСОКОТЕХНОЛОГИЧНЫХ ПРЕДПРИЯТИЙ И ПРОИЗВОДСТВ. УПРАВЛЕНИЕ В ОРГАНИЗАЦИОННЫХ СИСТЕМАХ
- Предложена методика интегральной оценки эффектов реализации проектов развития производственной системы.
- С целью получения синтетической оценки разработана система показателей для исследования эффектов проектов развития производственной системы – проектов по внедрению нового оборудования.
- Эффекты от внедрения нового оборудования подразделяются на внутренние и внешние эффекты различной природы: эффект развития потенциала, социально-экономические, эффект импортонезависимости, общественные, экологические.
- На базе авторской системы показателей разработана методика компаративного сопоставления показателей с использованием нормированных индексов и обоснован расчет обобщенного показателя.
Цели. Результативное импортозамещение возможно только за счет создания и использования эффективных отечественных производственных мощностей. Цель исследования состоит в разработке и обосновании методики интегральной оценки эффектов, полученных от проектов по внедрению нового оборудования, включая проекты по импортозамещению.
Методы. Основой исследования явились системный и диалектический подходы, а также методы системного, компаративного, экономико-математического и статистического анализа.
Результаты. В работе предложена методика интегральной оценки эффектов реализации проектов развития производственной системы. С целью получения синтетической оценки разработана система показателей для исследования эффектов проектов развития производственной системы – проектов по внедрению нового оборудования. Эффекты от внедрения нового оборудования подразделяются на внутренние и внешние эффекты различной природы: эффект развития потенциала, социально-экономические, эффект импортонезависимости, общественные, экологические. При этом индикаторами эффектов являются не текущие значения показателей, а их изменения в динамике. Комплексное рассмотрение эффектов позволяет расширить существующие критерии принятия решений при реализации проектов по развитию производственной системы, что позволяет оценить воздействие и на предприятие, и на общество в целом. Авторы определяют количественные и качественные показатели для каждой группы эффектов. На базе авторской системы показателей разработана методика компаративного сопоставления показателей с использованием нормированных индексов и обоснован расчет обобщенного показателя. Предложенная система показателей была успешно апробирована на наукоемком предприятии АО «Лыткаринский завод оптического стекла» при оценке эффектов от внедрения нового отечественного прибора для развития производственной системы.
Выводы. Результаты апробации методики позволили обосновать применение разноплановых показателей для количественной и качественной оценки эффектов от внедрения наукоемких проектов, включая проекты по импортозамещению техники и оборудования. Совокупность различных эффектов будет проявляться для любой социально-экономической системы, поэтому предлагаемая методика для оценки эффектов является в определенной мере универсальной и может быть адаптирована для научно-технических и технологических проектов по импортозамещению любого промышленного предприятия.
МИРОВОЗЗРЕНЧЕСКИЕ ОСНОВЫ ТЕХНОЛОГИИ И ОБЩЕСТВА
- Целью работы является совершенствование научно-методологического аппарата наук об искусственном интеллекте (ИИ) за счет обогащения их понятийного аппарата.
- Автор статьи структурирует понятие технологического пакета ИИ, описывая его системные свойства, связи и функциональные элементы сообразно видам мыслительной и деятельностной активности человека.
- Показано, что общая таксономия может служить в качестве инструмента совершенствования стратегий, методологических документов и государственных программ, определяющих развитие систем ИИ на государственном или отраслевом уровне.
Цель. Целью работы является совершенствование научно-методологического аппарата наук об искусственном интеллекте (ИИ) за счет обогащения их понятийного аппарата. Применяемый в настоящее время понятийный аппарат наук об ИИ не отражает сложной специфики данного технологического и социальноэкономического феномена, как обладающего комплексом возможностей и соответствующих им взаимосвязей, позволяющих имитировать когнитивные функции человека и получать сопоставимые с ними результаты. С этой целью автор статьи структурирует понятие технологического пакета ИИ, описывая его системные свойства, связи и функциональные элементы сообразно видам мыслительной и деятельностной активности человека.
Методы. Исследование основано на концепции (методе) технологических пакетов – генетически и функционально связанных совокупностей технологий, обладающих системными свойствами.
Результаты. Впервые в отечественной и зарубежной практике уточнена и структурирована базовая (общая) таксономия технологического пакета ИИ, а также предложена таксономия метатехнологического пакета (пакета метатехнологий) ИИ. Общая таксономия может служить в качестве инструмента совершенствования стратегий, методологических документов и государственных программ, определяющих развитие систем ИИ на государственном или отраслевом уровне.
Выводы. Предложенные базовая (общая) таксономия технологического пакета и таксономия пакета метатехнологий позволяют отойти от редуцированного представления об ИИ, повышают семантическую и методологическую ясность в отношении ИИ как сложного техносоциального феномена и способствуют гармонизации интеграции систем ИИ в сфере социально-экономической деятельности государства, могут стать основой для дальнейшего совершенствования государственного экономического и правового регулирования развития ИИ.
ГЕОИНФОРМАТИКА
- Разработана архитектура распределенной геоинформационной технологии, ориентированная на мониторинг снежного покрова от выполнения измерений, агрегации данных и их валидации до их передачи в централизованную систему обработки.
- Разработан прототип модулей носимого пользовательского терминала, позволяющий провести апробацию данной технологии.
- Предложенная архитектура способна функционировать в обстоятельствах ограниченной телекоммуникационной доступности, а также обеспечивать контроль целостности данных и персонализацию ответственности за их получение путем введения электронной подписи каждого сеанса измерений.
Цель. Снежный покров оказывает комплексное многофакторное влияние на окружающую среду, являясь связующим звеном между глобальными климатическими процессами и системой земной поверхности. Мониторинг снежного покрова является одной из ключевых задач гидрометеорологии, в рамках которого проводится систематический регулярный сбор его показателей. Целью работы является разработка архитектуры геоинформационной технологии мониторинга снежного покрова, комплексно решающей проблему автоматизации сбора показателей снежного покрова и их дальнейшего сопровождения, а также расширяемой для других задач гидрометеорологического мониторинга.
Методы. Используется метод анализа существующей фундаментальной базы в области сбора данных снежного покрова, а также метод системного подхода при описании архитектуры распределенной геоинформационной технологии.
Результаты. Разработана архитектура распределенной геоинформационной технологии, ориентированная на мониторинг снежного покрова, от выполнения измерений, агрегации данных и их валидации до их передачи в централизованную систему обработки. Разработан прототип модулей носимого пользовательского терминала, позволяющий провести апробацию данной технологии.
Выводы. Предложенная архитектура способна функционировать в обстоятельствах ограниченной телекоммуникационной доступности, а также обеспечивать контроль целостности данных и персонализацию ответственности за их получение путем введения электронной подписи каждого сеанса измерений. Данная архитектура может быть расширена путем разработки и внедрения модулей для других типов измерений.

ISSN 2500-316X (Online)



























