


INFORMATION SYSTEMS. COMPUTER SCIENCES. ISSUES OF INFORMATION SECURITY
- This article discusses a new way of generating keyboard handwriting using a touch keyboard for authentication in currently existing mobile systems.
- Touch force and the intermediate interval are sufficient to obtain the necessary characteristics, in order to formulate a refined user portrait depending on the user’s keyboard handwriting.
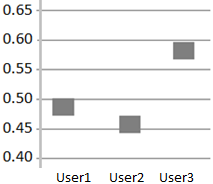
- Experimental statistics are given separately for an average sample of three different users depending on touch force. They also provide the results of authentication when using both standard deviations of pressing and the intervals when using the touch keyboard for the iOSXcode platform.
Objectives. This article discusses a new way of generating keyboard handwriting using a touch keyboard for authentication in currently existing mobile systems.
Methods. Due to the insufficient reliability of single password authentication, the proposal is to use it in combination with characteristics which correspond to handwriting on mobile devices. This article demonstrates the possibility of using individual user characteristics in the formulation of keyboard handwriting on devices with touch keyboards. The type of keyboard used affects the characteristics of keyboard handwriting, so this aspect can be used to improve password authentication reliability. The authentication process in the information environment can be supplemented with data on the nature of the impact on a touch keyboard. The use of the built-in 3D Touch function is also of interest. This is available when working on mobile devices and appliances equipped with a touch keyboard. The paper demonstrates that the use of one parameter only is insufficient for accurate authentication. The study proposes a method of determining an acceptable error range for both the touch force and the intermediate interval during authentication. For this purpose, the Laplace function which formulates the interval of each characteristic depending on the required probability of user recognition is used.
Results. Touch force and the intermediate interval are sufficient to obtain the necessary characteristics, in order to formulate a refined user portrait depending on the user’s keyboard handwriting. Experimental statistics are given separately for an average sample of three different users depending on touch force. They also provide the results of authentication when using both standard deviations of pressing and the intervals when using the touch keyboard for the iOSXcode platform.
Conclusions. The conclusion relates to the possibility of user authentication by keyboard handwriting, formulated on the basis of both the touch force on the keyboard symbols and intervals between pressing. Using the values of the sample mean and standard deviations allows authentication according to the required recognition probability.
MULTIPLE ROBOTS (ROBOTIC CENTERS) AND SYSTEMS. REMOTE SENSING AND NON-DESTRUCTIVE TESTING
- Prospects for using the rapidly exploring random tree method as a constructive basis for creating a universal motion planner are evaluated for mobile and robotic manipulators, including autonomous robotic systems with a manipulator on a moving platform.
- The effectiveness of the applied application of the rapidly exploring random tree method is confirmed by examples of modeling a mobile platform with an onboard manipulator and the results of full-scale experiments with a prototype of the ARAKS reconfigurable mechatronic-modular robotic manipulators.
Objectives. The work analyzes features of one of the most promising approaches to solve the problems for motion planning of autonomous robotic manipulators of various types and purposes using the rapidly exploring random tree (RRT) method. The development of modern robotics is shown to be inextricably linked with the improvement of the designs of the created samples, for which the placement of a manipulator on platform becomes a typical layout option. Prospects for using the RRT method as a constructive basis for creating a universal motion planner are evaluated for mobile and robotic manipulators, including autonomous robotic systems with a manipulator on a moving platform.
Methods. The object of the research is the RRT method and its well-known modifications RRT* and RRT-Connect. The effectiveness of applying such methods for solving problems associated with planning the motions of robotic manipulators of various types was evaluated using computer and natural simulation methods.
Results. Based on a review of the literature and the results of the research, the wide possibilities of the RRT method can be used for solving motion planning problems not only for mobile and robotic manipulators, but also for robotic systems on whose transport platform an onboard manipulator has been installed (including those having a redundant or reconfigurable structure). The effectiveness of the applied application of the RRT method is confirmed by examples of modeling a mobile platform with an onboard manipulator and the results of full-scale experiments with a prototype of the ARAKS reconfigurable mechatronic-modular robotic manipulators (RTU MIREA, Russia). It can be experimentally demonstrated and theoretically substantiated that the final dimension of the exploring tree, and hence the time of its construction up to reaching a given target state, is largely determined by the value of the growth factor.
Conclusions. The generalization of the results obtained opens up real prospects for using the RRT method as a constructive basis not only for creating universal means for motion planning mobile robotic systems with an onboard manipulator, but also for solving the problems of automating the docking of autonomous mobile platforms.
MODERN RADIO ENGINEERING AND TELECOMMUNICATION SYSTEMS
- The aim of this paper is to determine the permissible values of printed circuit assembly (PCA) vibration acceleration amplitudes to be compared with the measured values obtained as a result of testing PCA for the effects of harmonic vibration.
- The Monte Carlo simulation method is used to calculate the permissible deviations of vibration accelerations. This consists in repeatedly calculating the values of the vibration acceleration amplitudes at random values of the physical and mechanical parameters of materials and geometric parameters of the PCA design within their tolerances.
- Experimental verification of this method was carried out using the SolidWorks software for modeling mechanical processes. This enabled the tolerance values for PCA vibration acceleration at the control point at the first resonant frequency to be established and experimental data to be obtained when introducing various defects.
Objectives. A variety of technical condition control methods are used in the production and operation of printed circuit assemblies (PCA) for radio-electronic means (REM). The main methods are optical, electrical, and thermal. However, not all possible defects can be detected using these methods. For example, a weakened PCA fastener in a block or the incorrect installation of an electric radioelement (ERE) on a printed circuit board (PCB) can be detected only by analyzing the mechanical characteristics of the REM. These factors, in particular, are the values of the vibration acceleration amplitudes on ERE or at selected PCB control points (hereinafter referred to as the PCA vibration acceleration amplitude). In order to draw a conclusion about the presence of a defect, the measured values of the vibration acceleration amplitudes obtained as a result of testing PCA for the effects of harmonic vibration are compared with the permissible values calculated during the simulation of mechanical processes in PCA. This takes into account the variations in the physical and mechanical parameters of materials and geometric parameters of the PCA design. The aim of this paper is to determine the permissible values of PCA vibration acceleration amplitudes to be compared with the measured values.
Methods. The Monte Carlo simulation method is used to calculate the permissible deviations of vibration accelerations. This consists in repeatedly calculating the values of the vibration acceleration amplitudes at random values of the physical and mechanical parameters of materials and geometric parameters of the PCA design within their tolerances.
Results. Experimental verification of this method was carried out using the SolidWorks software for modeling mechanical processes. This enabled the tolerance values for PCA vibration acceleration at the control point at the first resonant frequency to be established and experimental data to be obtained when introducing various defects. The results of comparing the measured values with the calculated tolerance enabled conclusions to be made with regard to the possibility of detecting PCA defects.
Conclusions. Using this method of calculating tolerances for the PCA vibration acceleration amplitude allows the presence of defects in REM that do not affect the electrical or thermal characteristics of REM to be determined, thus increasing the efficiency of technical condition control.
- The study aims to reduce the effect of multipath propagation of radio waves in the communication channel under complex interference conditions.
- The presented model for a multi-element, spatially-distributed, in-phase receiving antenna of various configurations, featuring an electronically adjustable radiation pattern, is designed to ameliorate the multipath nature of signal propagation.
- A simulation of a multipath communication channel was carried out in the presence of one main and three reflected beams of radio wave propagation, as well as with harmonic interference at two angles of its arrival and different frequency detuning relative to the frequency of the useful signal.
Objectives. Radio-technical information transmission systems are widely used in various sectors of our life, not only for telecommunications and associated domestic needs, but also for the functioning of various special services, such as emergency response units, which increasingly use robotic complexes in the course of their work. In the event of an emergency, robot devices can be used to get in under rubble, in concrete pipes or other municipal facilities, which typically result in a sharp deterioration of the necessary conditions for the propagation of radio waves. In this regard, the problem of ensuring reliable communication with the robotic complex becomes rather acute. The aim of the present work is to reduce the effect of multipath propagation of radio waves in the communication channel under complex interference conditions.
Methods. The methods of statistical radio engineering and mathematical modeling are used according to optimal signal reception theory.
Results. The presented model for a multi-element, spatially-distributed, in-phase receiving antenna of various configurations, featuring an electronically adjustable radiation pattern, is designed to ameliorate the multipath nature of signal propagation. A simulation of a multipath communication channel was carried out in the presence of one main and three reflected beams of radio wave propagation, as well as with harmonic interference at two angles of its arrival and different frequency detuning relative to the frequency of the useful signal. The probability of a bit error when receiving discrete information using the proposed antenna is estimated.
Conclusions. The proposed signal processing algorithm on the receiving side can be used to partially compensate for the influence of the multipath effect. As a result, the noise immunity of information reception in comparison with reception on an omnidirectional antenna with one antenna element increases: for a bit error probability of 10−3, the energy gain ranges from 2 dB for two beams to 7–10 dB for three or four beams. In the presence of concentrated harmonic interference in the radio channel, its simultaneous spatial (by the antenna) and spectral (by the demodulator) filtering is also observed, the effectiveness of which depends on the direction of arrival and the frequency detuning of the interference, which also leads to a significant decrease in the error probability.
MATHEMATICAL MODELING
- A mathematical model for determining the dependencies between the state vector of the satellite, the state vector of the point being imaged on the Earth’s surface, and the distribution fields of the velocity vectors and accelerations of the motion of the image along the focal plane of the optoelectronic payload was developed.
- The proposed mathematical model can be used both with an optoelectronic payload when modeling shooting modes and estimating image displacements at the design stage of a satellite, as well as at the satellite operation stage when incorporating the presented model in the onboard satellite software.
Objectives. The paper considers a satellite with an optoelectronic payload designed to take pictures of the Earth’s surface. The work sets out to develop a mathematical model for determining the dependencies between the state vector of the satellite, the state vector of the point being imaged on the Earth’s surface, and the distribution fields of the velocity vectors and accelerations of the motion of the image along the focal plane of the optoelectronic payload.
Methods. The method is based on double differentiation of the photogrammetry equation when applied to a survey of the Earth’s surface from space. For modeling the orbital and angular motion of the satellite, differential equations with numerical integration were used. The motion parameters of the Earth’s surface were calculated based on the Standards of Fundamental Astronomy software library.
Results. Differential equations of motion of the image were obtained. Verification of the developed mathematical model was carried out. The motion of the considered satellite was simulated in orbital orientation mode using an image velocity compensation model. The distribution fields of velocity vectors and accelerations of motion of the image of the Earth’s surface were constructed. The residual motion of the field of image following compensation was investigated.
Conclusions. The proposed mathematical model can be used both with an optoelectronic payload when modeling shooting modes and estimating image displacements at the design stage of a satellite, as well as at the satellite operation stage when incorporating the presented model in the onboard satellite software. The presented dependencies can also be used to construct an image transformation matrix, both when restoring an image and when obtaining a super-resolution.
- A valley is a region of an objective function landscape in which the function varies along one direction more slowly than along other directions.
- A linear relation of logarithm of valley ratio to logarithm of minimum position error was obtained.
- The obtained relations may be used for estimating the expected error of extremum coordinates in optimization problems.
Objectives. A valley is a region of an objective function landscape in which the function varies along one direction more slowly than along other directions. In order to determine the error of the objective function minimum location in such regions, it is necessary to analyze relations of valley parameters.
Methods. A special test function was used in numerical experiments to model valleys with variables across wide ranges of parameters. The position and other valley parameters were defined randomly. Valley dimensionality and ratio were estimated from eigenvalues of the approximated Hessian of objective function in the termination point of minimum search. The error was defined as the Euclidian distance between the known minimum position and the minimum search termination point. Linear regression analysis and approximation with an artificial neural network model were used for statistical processing of experimental data.
Results. A linear relation of logarithm of valley ratio to logarithm of minimum position error was obtained. Here, the determination coefficient R2 was ~0.88. By additionally taking into account the Euclidian norm of the objective function gradient in the termination point, R2 can be augmented to ~0.95. However, by using the artificial neural network model, an approximation R2 ~ 0.97 was achieved.
Conclusions. The obtained relations may be used for estimating the expected error of extremum coordinates in optimization problems. The described method can be extended to functions having a valley dimensionality of more than one and to other types of hard-to-optimize algorithms regions of objective function landscapes.
The study showed that the Wrońskian of a system of solutions of a linear homogeneous equation can serve as an indicator of the linear dependence or independence of this system in cases where the number of solutions is lower than the order of the equation; here, the solutions are linearly dependent if and only if their Wrońskian is identically equal to zero. In this case, there is no need to check whether the determinant vanishes over the entire domain of definition, since it is sufficient to do this on an arbitrarily chosen interval or even on an arbitrarily chosen set having a limit point.
Objectives. The work sets out to study the properties of the Wrońskian determinant of the system of solutions to a linear homogeneous equation in cases when the number of solutions is less than the order of the equation, comparing them with the known properties of the same determinant when the number of solutions is equal to the order of the equation.
Methods. The work uses the methods of linear algebra according to the theory of ordinary differential equations, as well as mathematical and complex analysis.
Results. It is shown that the vanishing of a considered determinant on an arbitrarily small interval implies its vanishing on the entire domain of definition; the solutions turn out to be linearly dependent. A stronger result is obtained in three cases: (1) if the coefficients of the equation are analytic functions; (2) if the number of solutions is equal to one; (3) if the number of solutions is one less than the order of the equation. Namely, if the set of zeros of the considered Wrońskian has a limit point belonging to the domain of definition of solutions, then the determinant is identically equal to zero and the solutions are linearly dependent.
Conclusions. According to the obtained results, the Wrońskian of a system of solutions of a linear homogeneous equation can serve as an indicator of the linear dependence or independence of this system in cases where the number of solutions is lower than the order of the equation; here, the solutions are linearly dependent if and only if their Wrońskian is identically equal to zero. In this case, there is no need to check whether the determinant vanishes over the entire domain of definition, since it is sufficient to do this on an arbitrarily chosen interval or even (in the special cases listed above) on an arbitrarily chosen set having a limit point.
ECONOMICS OF KNOWLEDGE-INTENSIVE AND HIGH-TECH ENTERPRISES AND INDUSTRIES. MANAGEMENT IN ORGANIZATIONAL SYSTEMS
- The paper proposes a method for the integrated assessment of production system development projects.
- In order to obtain a synthetic assessment, a system of indicators was developed to study the effects of production system development projects, i.e., projects for the introduction of new equipment.
- The effects of the introduction of new equipment can be divided into internal and external: potential development, socioeconomic, import independence, public, and environmental.
- On the basis of the author’s system of indicators, a methodology for comparative comparison of indicators using normalized indices was developed and the calculation of a generalized indicator substantiated.
Objectives. Effective import substitution can be achieved only through the creation and use of efficient domestic production capacities. The aim of this study is to develop and justify a method for the integrated assessment of the effects of projects aimed at the introduction of new equipment, including import substitution projects.
Methods. The research was based on systemic and dialectical approaches, as well as systemic, comparative, economic and mathematical methods, and statistical analysis.
Results. The paper proposes a method for the integrated assessment of production system development projects. In order to obtain a synthetic assessment, a system of indicators was developed to study the effects of production system development projects, i.e., projects for the introduction of new equipment. The effects of the introduction of new equipment can be divided into internal and external: potential development, socioeconomic, import independence, public, and environmental. The indicators are not current values, but changes in dynamics. A comprehensive consideration of the effects allows the existing criteria for decision-making to be expanded when implementing projects to develop the production system. It also allows the impact on both the enterprise and society to be assessed. The authors define both the quantitative and qualitative indicators for each group of effects. On the basis of the author’s system of indicators, a methodology for comparative comparison of indicators using normalized indices was developed and the calculation of a generalized indicator substantiated. The proposed system of indicators was successfully tested at the Lytkarino Optical Glass Factory science-intensive enterprise when assessing a new domestic device for the development of the production system.
Conclusions. The results of the approved method for integrated assessment enabled the use of diverse indicators for the quantitative and qualitative assessment of the effects of the introduction of science-intensive projects. This included projects for import substitution of machinery and equipment. A combination of various effects will be relevant to any socioeconomic system, so the proposed integrated assessment method for evaluating the effects is universal to a certain extent. It can thus be adapted for scientific, technical and technological projects on import substitution of any industrial enterprise.
PHILOSOPHICAL FOUNDATIONS OF TECHNOLOGY AND SOCIETY
- The study aims to enhance the scientific and methodological apparatus of artificial intelligence (AI) sciences by enriching their conceptual framework.
- The author structures the concept of the technological package of AI, describing its system properties, connections and functional elements based on the various types of human cognitive and operational activities.
- It is shown that general taxonomy can serve as a tool for improving strategies, methodological documents and state programs to define the development of AI systems at state or industry level.
Objectives. The aim ofthis work is to enhance the scientific and methodological apparatus of artificial intelligence (AI) sciences by enriching their conceptual framework. The current conceptual framework of AI sciences does not reflect the intricate nature of this technological and socioeconomic phenomenon as possessing the diverse range of capabilities and the interconnectedness that allows for the imitation of human cognitive functions and comparable results. The author of the article structures the concept of the technological package of AI, describing its system properties, connections and functional elements based on the various types of human cognitive and operational activities.
Methods. The research is based on the concept (method) of technological packages—genetically and functionally connected sets of technologies with system properties.
Results. For the first time in Russian and international practice, the basic (general) taxonomy of the AI technological package has been specified and structured. A taxonomy of the AI metatechnological package (a package of metatechnologies) has been proposed. General taxonomy can serve as a tool for improving strategies, methodological documents and state programs to define the development of AI systems at state or industry level.
Conclusions. The suggested basic (general) taxonomy oftechnological package and taxonomy of metatechnologies package allows research to move away from the limited view of AI. It increases semantic and methodological clarity in relation to AI as a complex technosocial phenomenon and contributes to the harmonized integration of AI systems intо the sphere of socioeconomic activities of the state. It can thus serve as a foundation for further improvement of state economic and legal regulation of AI development.
GEOINFORMATICS
- The architecture of distributed geoinformation technology focused on snow cover monitoring from measurements, data aggregation, and validation to their transfer to a centralized processing system is given.
- A prototype of wearable user terminal modules for testing this technology is developed.
- The proposed architecture is able to function in circumstances of limited telecommunication availability, as well as to ensure data integrity control and personalization of responsibility for their receipt by introducing an electronic signature of each measurement session.
Objectives. Snow cover has a complex multifactorial impact on the environment as a link between global climatic processes and the system of the Earth’s surface. Snow cover monitoring is one of the key tasks of hydrometeorology which also requires the systematic regular collection of its indicators. This work aims to develop an architecture of geoinformation technology for snow cover monitoring with the purpose of addressing the problem of automating the collection of snow cover indicators and their further maintenance. This architecture can also be used for other hydrometeorological monitoring tasks.
Methods. This paper analyzes the existing fundamental basis of snow cover data collection and uses the method of systems approach to describe the architecture of distributed geoinformation technology.
Results. The paper presents an architecture of distributed geoinformation technology focused on snow cover monitoring from measurements, data aggregation, and validation to their transfer to a centralized processing system. A prototype of portable user terminal modules for testing this technology is developed.
Conclusions. The proposed architecture is capable of functioning in circumstances of limited telecommunication availability, while ensuring data integrity control and personalization of responsibility by introducing an electronic signature of each measurement session. This architecture can be expanded by developing and implementing modules for other types of measurements.

ISSN 2500-316X (Online)



























